|
Il y a actuellement 1 visiteur
|




SLT07 Levage translation, Maintenance / Rétrofit
enseignement
SYSTEME PORTIQUE: TREUIL à CABLE - BRAS ROBOTISE ou PREHENSEUR SLT 07
Partie Opérative sécurisée et Commande associée.
Usage pédagogique – Filières : conception, électrotechnique, maintenance, automatisme.
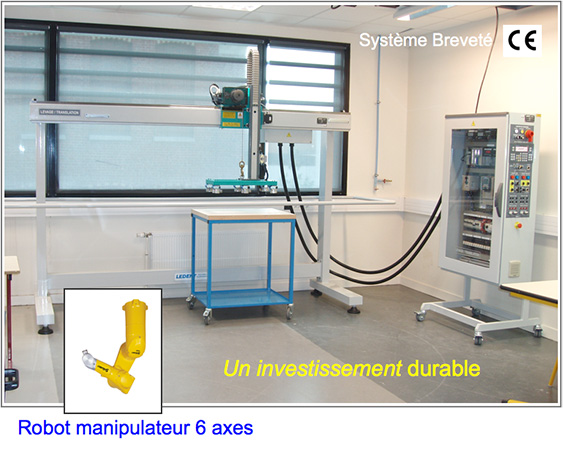
Le système permet de mettre à disposition des enseignants et des élèves un système automatisé d’empilage / dépilage par treuil à câble et crochet ou bras de préhension, équipé soit en ventouses magnétiques ou par vide, soit par pince pneumatique.
Trois technologies interchangeables.
Domaine : robotique de production industrielle.
Electrotechnique : paramétrage, communication
Automatisme : programmation, pilotage.
Maintenance : modifications, réglage, dépannage.
Conception : règles de construction.
Sécurité : directives et normes associées.
Exemples d’application : portique robotisé, dispositifs d’alimentation sur ligne de production.
Société d’études techniques fondée en 1985. Concepteur de machines spéciales, machines outils et équipements de production pour l’industrie. Depuis 1998 concepteur et fabricant de bancs didactiques pour formations technologiques. Devient en 2014 Ledent sas commercialisation d’outils didactiques et simulateurs dans les domaines de la mécatronique, électrotechnique, l’automatisme, maintenance et conception.
|
 |
LEDENT SAS
ZA de la Gandonne BP 20259 - 13666 Salon de Provence Cedex - FranceTel : 33 (0) 4 90 429 297 - Fax : 33 (0) 4 90 429 326 – E mail : c.ledent@ledent.fr |